
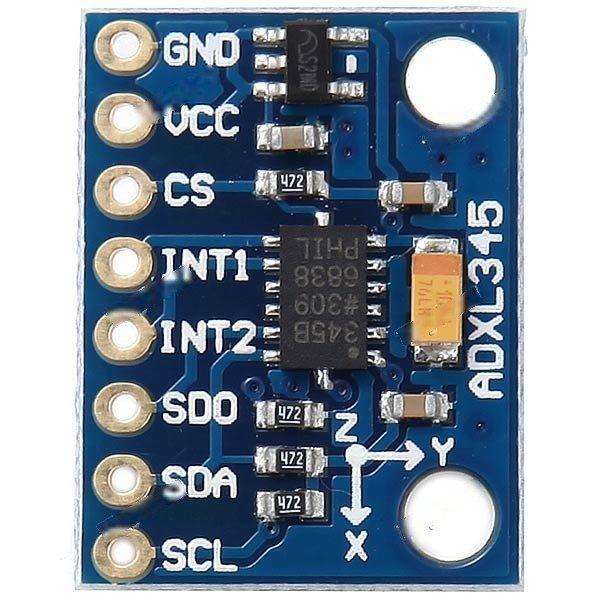
The ADXL345 is well suited for mobile device applications. It measures the static acceleration of gravity in tilt-sensing applications, as well as dynamic acceleration resulting from motion or shock. Its high resolution (4 mg/LSB) enables measurement of inclination changes less than 1.0°.
Several special sensing functions are provided. Activity and inactivity sensing detect the presence or lack of motion and if the acceleration on any axis exceeds a user-set level. Tap sensing detects single and double taps. Free-fall sensing detects if the device is falling. These functions can be mapped to one of two interrupt output pins. An integrated, patent pending 32-level first in, first out (FIFO) buffer can be used to store data to minimize host processor intervention.
Connection
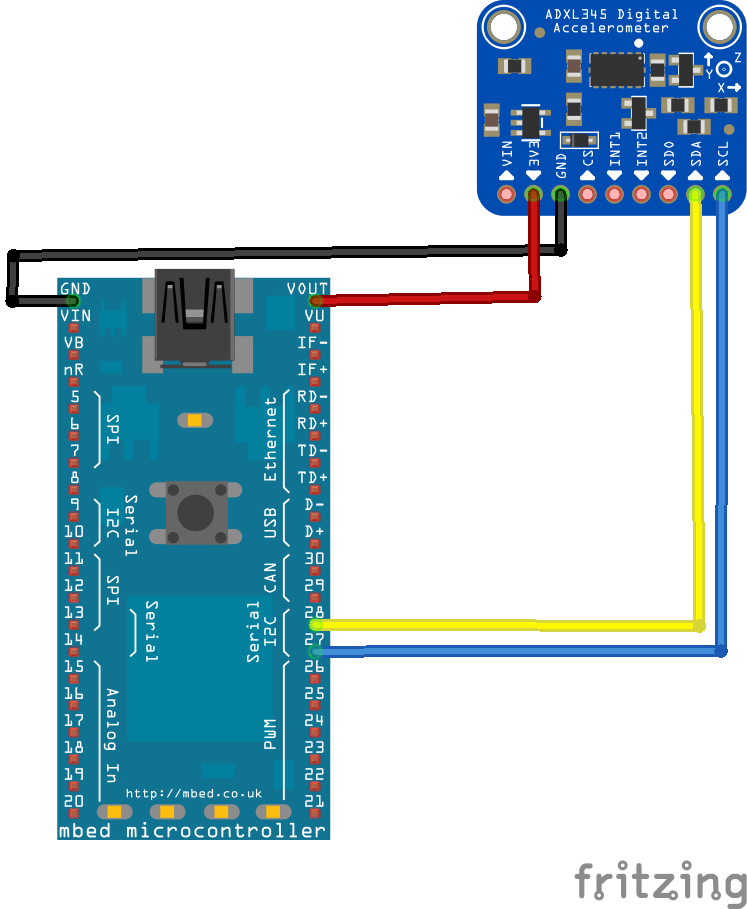
I used the following connection from the module above to my MBED 1768
| MBED Connection | Module Connection |
| 3v3 – VOUT | VCC |
| Gnd | Gnd |
| SDA – Pin 28 | SDA |
| SCL – Pin 27 | SCL |
This is a layout showing the connection
Code
This needs the following example – https://developer.mbed.org/users/peterswanson87/code/ADXL345_I2C/ – Add this to the MBed compiler
Here is the code
[codesyntax lang=”cpp”]
#include "ADXL345_I2C.h"
ADXL345_I2C accelerometer(p28, p27);
Serial pc(USBTX, USBRX);
int main() {
pc.baud(115200);
int readings[3] = {0, 0, 0};
pc.printf("Starting ADXL345 test...\n");
wait(.001);
pc.printf("Device ID is: 0x%02x\n", accelerometer.getDeviceID());
wait(.001);
// These are here to test whether any of the initialization fails. It will print the failure
if (accelerometer.setPowerControl(0x00)){
pc.printf("didn't intitialize power control\n");
return 0; }
//Full resolution, +/-16g, 4mg/LSB.
wait(.001);
if(accelerometer.setDataFormatControl(0x0B)){
pc.printf("didn't set data format\n");
return 0; }
wait(.001);
//3.2kHz data rate.
if(accelerometer.setDataRate(ADXL345_3200HZ)){
pc.printf("didn't set data rate\n");
return 0; }
wait(.001);
//Measurement mode.
if(accelerometer.setPowerControl(MeasurementMode)) {
pc.printf("didn't set the power control to measurement\n");
return 0; }
while (1) {
wait(0.1);
accelerometer.getOutput(readings);
pc.printf("%i, %i, %i\n", (int16_t)readings[0], (int16_t)readings[1], (int16_t)readings[2]);
}
}
[/codesyntax]
Links
GY-291 ADXL345 3-Axis Digital Gravity Sensor Acceleration Module IIC/SPI transmission
